Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
projects
IDMP
I am currently working on the IDMP framework, that we open-sourced. It uses Gaussian Processes to model Distance Fields and can be used for planning and other applications. Feel free to check it out!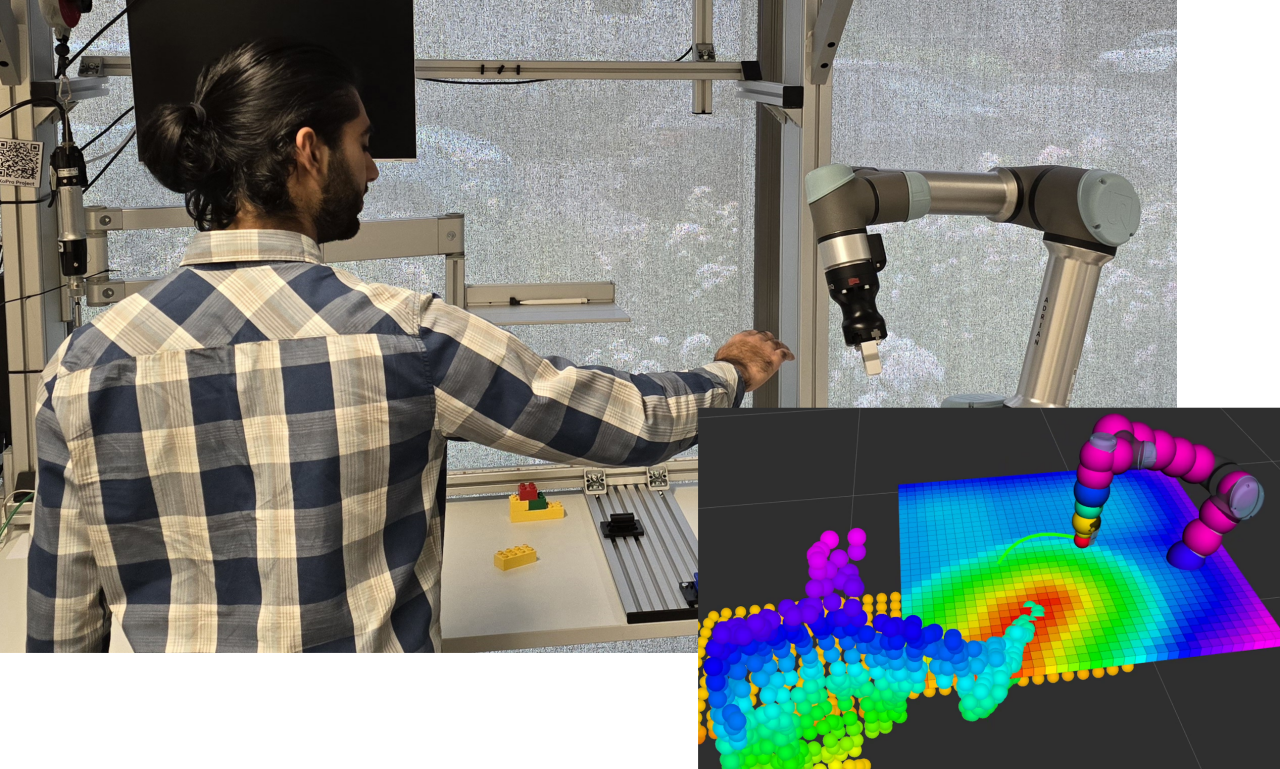
Robotic Vision Summer School
During my stay in Sydney, i attended the Robotic Vision Summer School. I learnt a lot and was able to talk to great people like Peter Corke. 
Robocup Small-Size League
I am part of the SSL Team Erforce from Erlangen. I have been working on the electronics and firmware, attending several international competitions.
Robothon Challenge
I took part in the Robothon Challenge hosted by the TU Munich twice, winning the first place in 2023. 
publications
Towards Recycling E-Waste Using Vision and Robotic Manipulation
Published in Australasian Conference on Robotics and Automation, ACRA, 2023
This paper is about utilizing a robot with a camera to recycle E-Waste. It encapsulates our work done during the Robothon 2023 competition.
Leveraging Interactive Distance Fields for Safe and Smooth Reactive Planning
Published in RSS’24 Workshop on Semantics for Robotics, 2024
This workshop paper is about combining IDMP with Riemannian Motion Policies.
Safe Human-Robot Interactions with Continuous and Differentiable Distance Fields
Published in 40th Anniversary of the IEEE Conference on Robotics and Automation, ICRA@40, 2024
This extended abstract is about using IDMP and RMP for safe interactions.
Interactive Distance Field Mapping and Planning to Enable Human-Robot Collaboration
Published in Robotics and Automation Letters, RA-L, 2024
This paper is about the open-source framework IDMP. It uses gaussian processes to create continuous and differentiable distance fields.